Controls
generate $\tau$ to get $\ddot{q}$
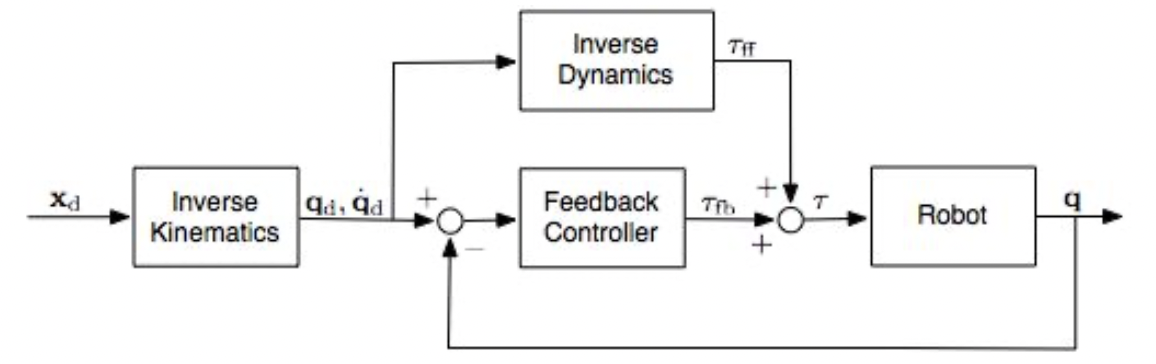
Feedforward control ( open loop )
Inverse Dynamics \(\tau = M(q_d)\ddot{q}_d + C(q_d,\dot{q}_d)+G(q_d)\) Forward/Direct Dynamics \(\ddot{q} = M(q)^{-1}(-C(q, \dot{q})-G(q)+\tau)\) eg. the pendulum system: \(I\ddot\theta + k\dot\theta+rmg\theta = \tau\)
Feedback steady-state error
Inverse dynamics control
Compare output $\ddot{q}$ with desired trajectory and correct. Let \(\tau = \underbrace{k_p(\theta_d-\theta)}_{\text{spring}}\underbrace{-k_v\dot{\theta}}_\text{damper}\) to manipulate the dynamics of the system.
\(I\ddot\theta + k\dot\theta+rmg\theta = \tau = -k_p(\theta_d-\theta)-k_v\dot{\theta}\) \(\red{I\ddot\theta + (k+k_v)\dot\theta}+(rmg+k_p)\theta = k_p\theta_d\)
System will end at $t \rightarrow \infty, (\ddot\theta=0,\dot\theta=0)$: \(\theta=\frac{k_p}{\red{rmg} +k_p}\theta_d\)
Because of gravity $rmg$ system will not reach target but will get close for large $k_p$. The steady state error is defined as: \(e_{ss} = \theta_d(\infty)-\theta(\infty) = \frac{rmg}{rmg+k_p}\) steady state error is finite if $g\neq0$.
PID controller: (I sums up remaining error. Generally NOT safe for robots) \(\tau = \underbrace{k_p(\theta_d-\theta)}_{\text{P:Proportional }}\underbrace{-k_v\dot{\theta}}_\text{ D:Derivative}+\underbrace{\red{k_i\int(\theta_d-\theta)dt}}_\text{I:Integral}\)
More general: \(\tau = K_P(q_d-q)-K_D(\dot q_d-\dot q)\) \(e_{ss} = q_d-q=K_P^{-1}G(q)\) $K_P,K_D$ are diagnal matrices with each joint of value $k_{Pi},k_{Di}$.
Gravity compensation
PD control with gravity compensation(Safer than PID): \(\tau = \underbrace{k_p(\theta_d-\theta)}_{\text{P:Proportional }}\underbrace{-k_v\dot{\theta}}_\text{ D:Derivative}+\underbrace{rmg\theta}_\text{gravity compensation}\)
\(I\ddot\theta + k\dot\theta+rmg\theta = \tau = -k_p(\theta_d-\theta)-k_v\dot{\theta}+rmg\theta\) \(\red{I\ddot\theta + (k+k_v)\dot\theta} + k_p\theta = k_p\theta_d\)
System will end at $t \rightarrow \infty, (\ddot\theta=0,\dot\theta=0)$: \(k_p\theta=k_p\theta_d\) \(e_{ss} = \theta_d-\theta = 0\) $rmg\theta$ is a feedforward estimation of gravity force. The controller is model-based(need to know G).
More general: \(\tau = K_P(q_d-q)-K_D(\dot q_d-\dot q) + \red{G(q)}\) \(e_{ss} = q_d-q=0\)
tracking complete trajectory
Feedback linearisation
Let \(\tau = M(q)\red{(\ddot q_d+K_P(q_d-q)+K_D(\dot q_d-\dot q))} + C(q,\dot{q})+G(q)\) Then dynamics equation reduces to: \(\underbrace{\ddot{q_d}-\ddot q}_{\ddot{e}}+K_P(\underbrace{q_d-q}_{e})+K_D(\underbrace{\dot q_d-\dot q}_{\dot{e}})=0\) define $e,\dot{e},\ddot{e}$ as above, we get: \(\ddot{e}+K_D\dot{e}+K_Pe=0\) 2nd order linear diff equation, err guaranteed to go to zero provided $K_P,K_D$ set correctly. Can control decay and frequency of tracking error.
⬆️ ALL Joint space control
Task space control
Desired motion in task space ( end effector ).
Task acceleration: \(\dot{x} = J(q)\dot{q}\) \(\ddot{x} = J(q)\red{\ddot{q}}+\dot J(q)\dot{q}\) Plug into Direct Dynamics: \(\red{\ddot{q}} = M(q)^{-1}(-C(q, \dot{q})-G(q)+\red{\tau})\) In static equilibrium, relationship between end-effector force $F$ and Joint torque $\tau$: \(\red{\tau} = J^TF\)
we get: \(\ddot{x} = -JM^{-1}C-JM^{-1}G+JM^{-1}\underbrace{J^TF}_{\tau}+\dot{J}\dot{q}\)
Multiply everything by $(JM^{-1}J^T)^{-1}$ get Operational Space Dynamics: \(\underbrace{(JM^{-1}J^T)^{-1}}_{M_x(q)}\ddot{x} +\underbrace{(JM^{-1}J^T)^{-1}(J^{-1}C-\dot{J}\dot{q})}_{C_x(q,\dot{q})} +\underbrace{(JM^{-1}J^T)^{-1}JM^{-1}G}_{G_x(q)} =F\) which specifies end-effector behavior independent of rest of the robot.
Still exists self-motion and Null Space Dynamics. Joint torque that yields no ee acceleration.
Assuming no gravity and no velocity: \(\ddot{x} = JM^{-1}\tau\) torque that produce 0 acceleration would be in Null space of $JM^{-1}$ , ($\tau$ is arbitrary): \(\tau = (\underbrace{I-J^T(JM^{-1}J^T)^{-1}JM^{-1}}_{I-J^+J})\tau_0\)
To summarise Operational space control equation: \(\tau = \underbrace{J^TF}_{\text{torques for ee accel.}}+ \underbrace{(I-J^T\overbrace{(JM^{-1}J^T)^{-1}JM^{-1}}^{\bar{J}^T })\tau_0}_{\text{0 ee accel. null space projection}}\) where $\bar{J} = M^{-1}J^T(JM^{-1}J^T)^{-1}$
To track a task-space target $x_d,\dot{x}_d,\ddot{x}_d$: \(\tau = J^TF+(I-J^T\bar{J}^T)\tau_0\) \(F = M_x\ddot{x}+C_x+G_x\) \(\ddot{x} = \ddot{x}_d+K_D(\dot{x_d}-\dot{x})+K_P(x_d-x)\) Operational space dynamics are linearised: \(\ddot{e} + K_D\dot{e}+K_Pe = 0\) \(e=x_d-x\) error guaranteed to go to 0. To account for null space dynamics: \(\tau_0 = K_{P_d}(q_d-q)-K_{D_q}\dot{q}\)
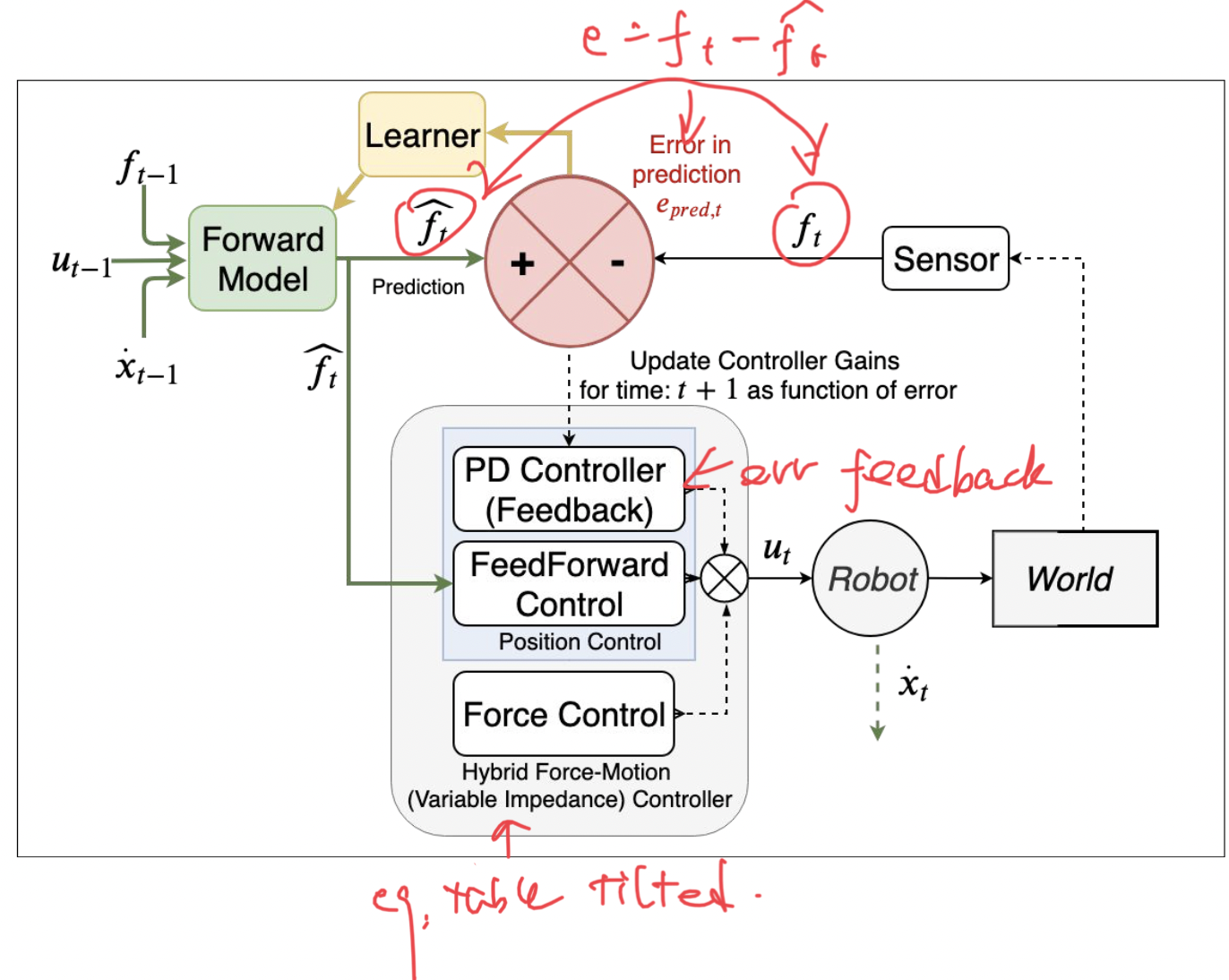
Impedance control
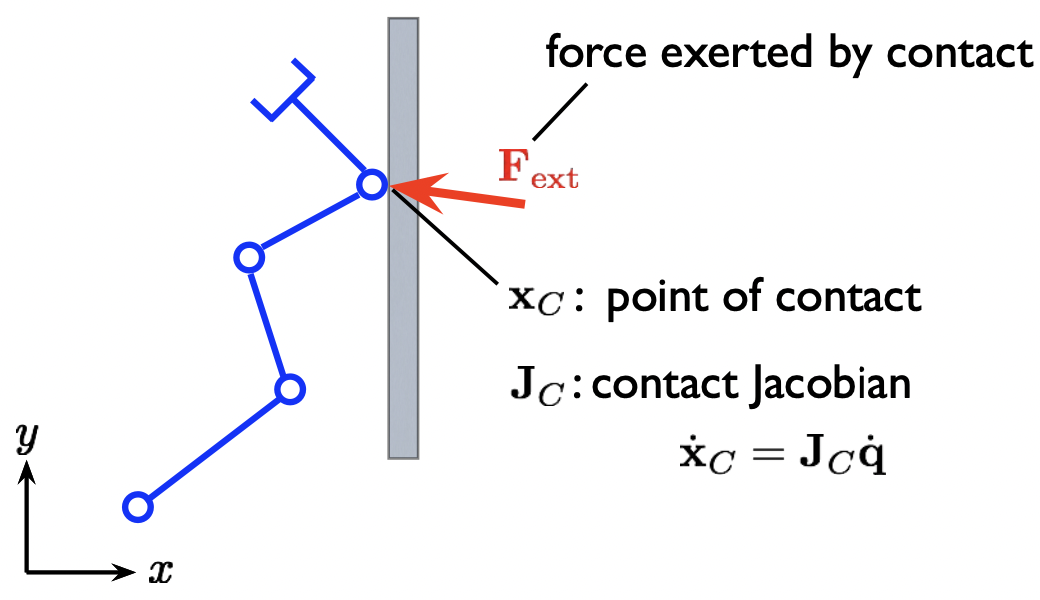
Robot with external forces $F_{ext}$, Inverse Dynamics: \(M(q_d)\ddot{q}_d + C(q_d,\dot{q}_d)+G(q_d) = \tau \red- J^T_CF_{ext}\) Where sign is positive when force is applied BY robot, negetive when force is applied TO robot.
$J_C$ is the Jacobian for the point where external force is applied.
Impedance Control Equation: \(M_d\ddot{\~x}+K_D\dot{\~x}+K_P\~x=F_{ext}\) Where \(\ddot q=y-M^{-1}J^TF_{ext}\) \(J\ddot q=\ddot x-\dot J\dot q\)
\(\~x = x_d-x\) \(\ddot{x}=\dot J\dot q+Jy-JM^{-1}J^TF_{ext}\) \(y=J^{-1}(\ddot{x}_d+M_d^{-1}K_D\dot{\~x}+M_d^{-1}K_P\~x-\dot J\dot q+\underbrace{M_d^{-1}F_{ext}+JM^{-1}J^TF_{ext}}_{\text{extra: force sensor at e.e.}})\)
Hybrid Force-motion control
- used for robot manipulator control
- seperate control of force and motion
- combine with impedance control of motion if necessary
- provide compliance along some axes